Years ago, my team and I developed an e-learning module to teach the setup, operation, disassembly, and cleaning
procedures for a food processing machine called Delinker. Although the
module was an effective training resource, I always envisioned taking the concept further using virtual reality
technology. Building on our prior work, we created this project to immerse learners in a fully computer-generated
training experience, expanding beyond traditional 2D e-learning resources.
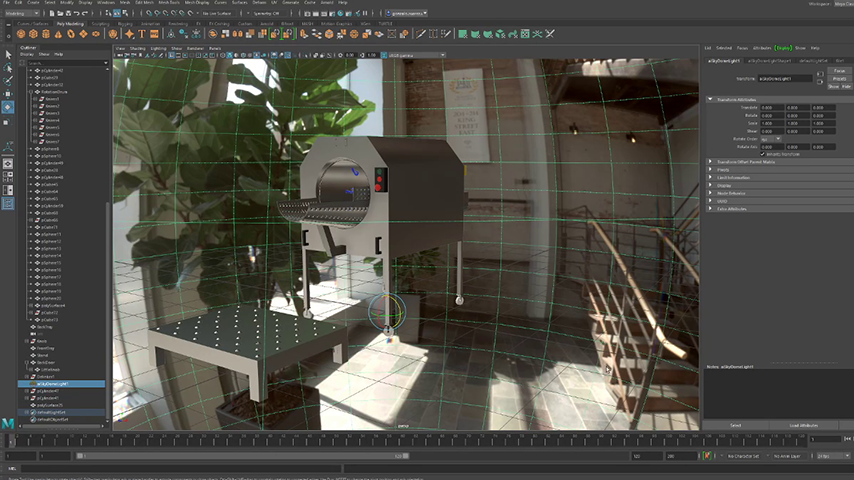
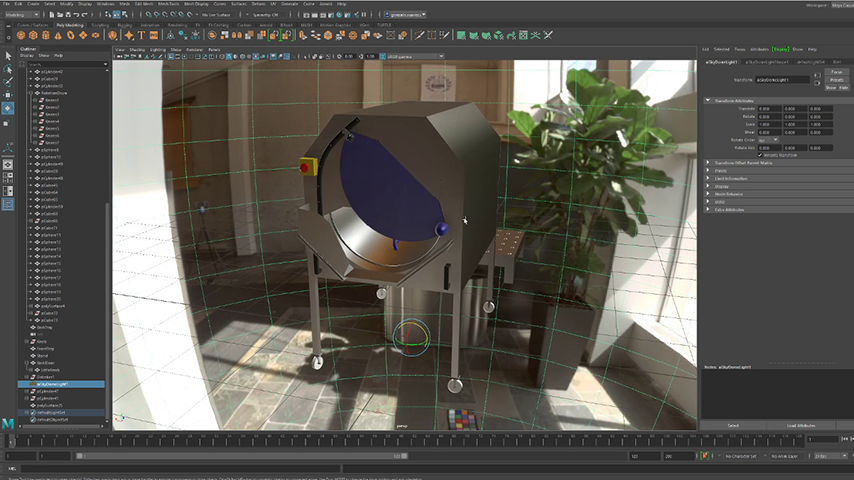
Creating detailed models and animations using Autodesk Maya.
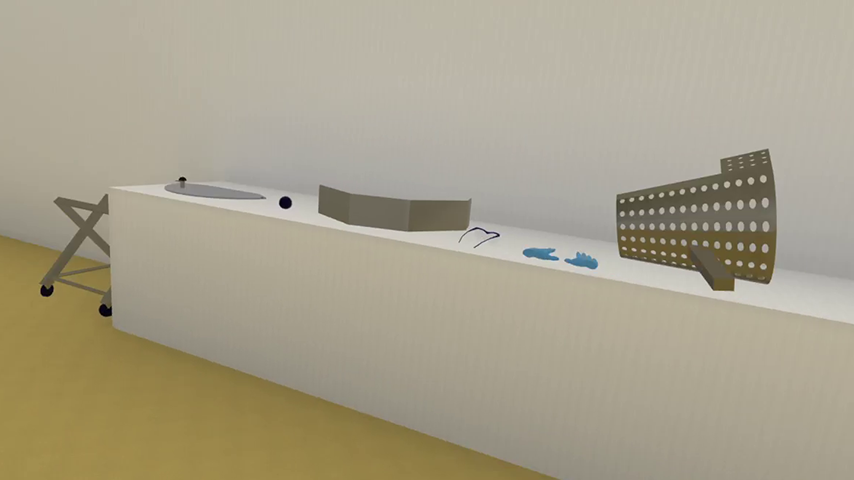
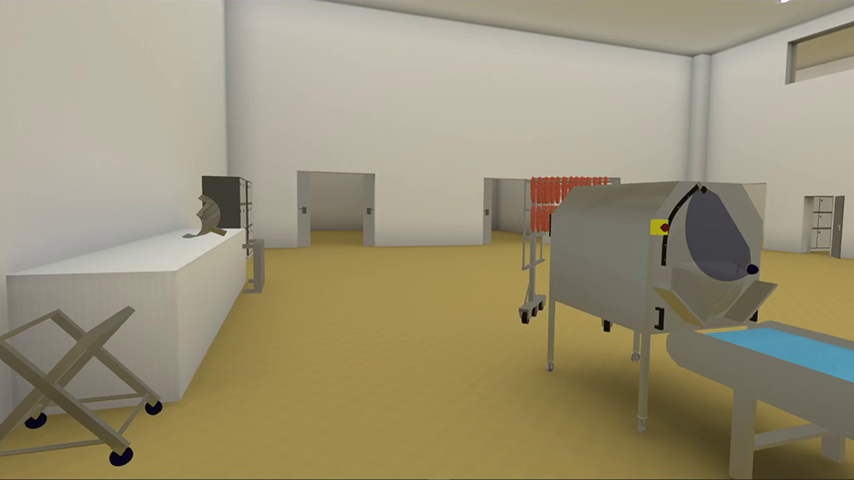
A virtual representation of the department where the Delinker machine operates.
The designated area for gathering personal protective equipment and machine components.
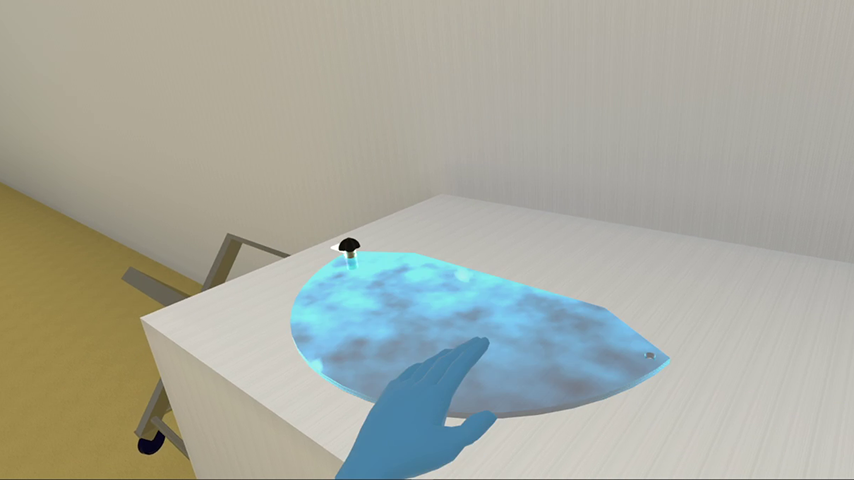
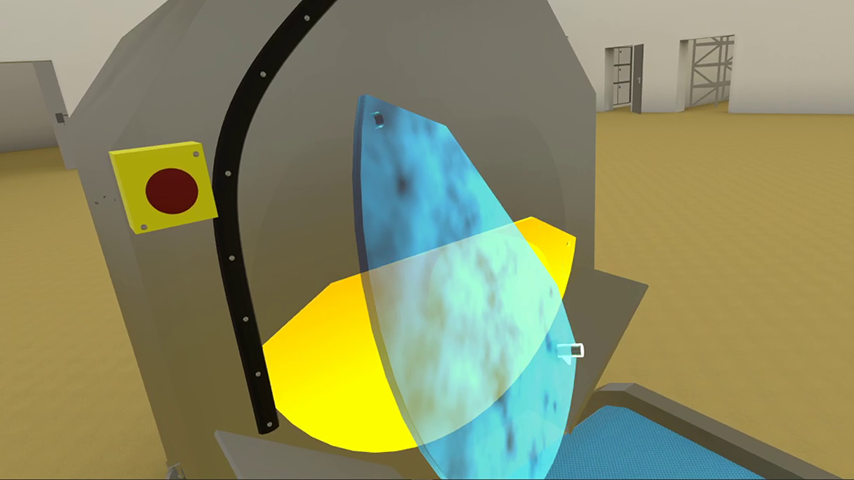
Automatically highlighted assembly points to assist users during the machine setup process.
Users can adjust the machine speed to simulate real-life conditions, enhancing engagement.
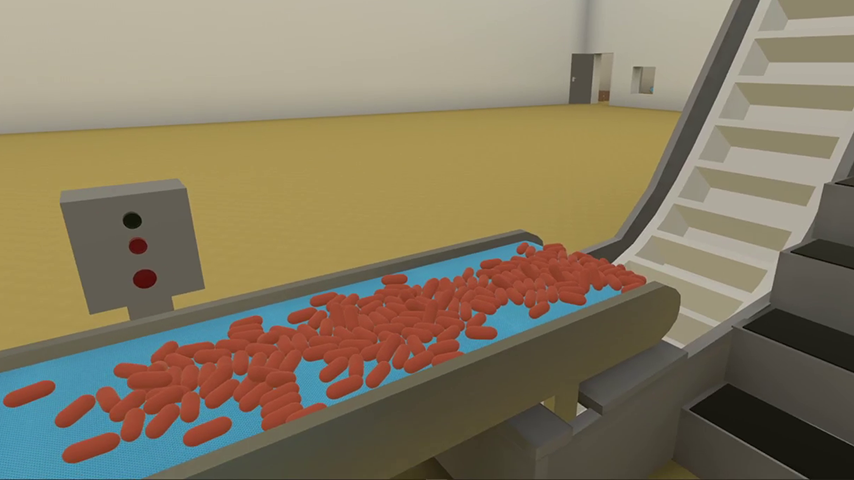
Sausages are precisely separated by the machine's inner knives.
Sausages travel up the conveyor belt to be weighed and classified for packaging by another machine.
Project Details
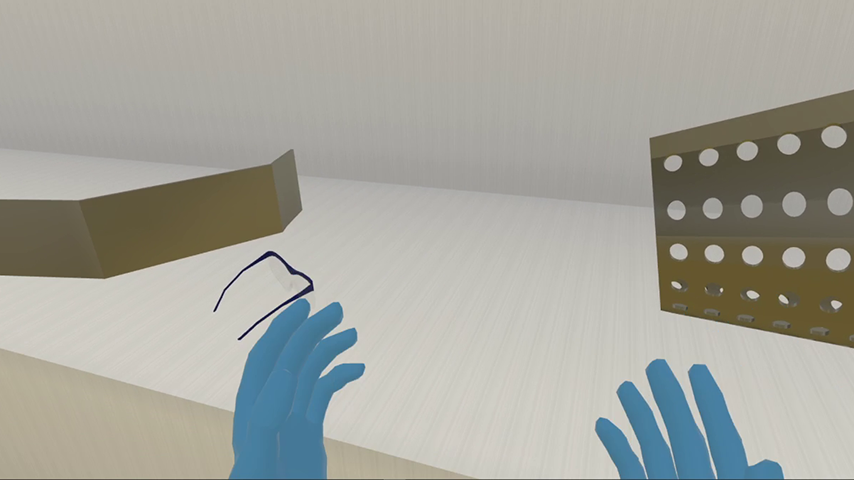
The core sections of the project include "Personal Protective Equipment (PPE)," "Setup," and "Operation." First, users
are guided to a designated PPE collection point. Then, they gather and assemble various machine components, with each
assembly point automatically highlighted to assist during the setup. Once in place, each component is securely locked.
After correctly adjusting all parts, users are instructed to power the machine and activate the conveyor belts. They
can adjust the machine's speed and manipulate the rear sliding door as part of the original procedure. In the final
stage, users prepare for the machine's operation by safely inserting the food for separation.
Development
We designed our training module to be compatible with the HTC VIVE
Pro headset so that we could take advantage of its higher resolution, advanced tracking system, and processing
power on our PC. These features were essential for creating an accurate and immersive user experience with a
consistent frame rate. We developed the app using the Unity engine, made
the machine, conveyor belts, and animations using Autodesk Maya,
and used ProBuilder to set up the environment.
Team and Collaboration
The project team consisted of four members: a subject matter expert, an instructional designer, and two developers. As
the lead developer, I coordinated with the team to ensure all relevant components from the original procedure were
accurate, delivering optimal performance and seamlessly integrating all components and tasks.
Key Responsibilities
Team Coordination: Facilitated communication and collaboration within an agile team.
Mechanics: Developed interactive elements and user interfaces in C# within Unity.
Lighting Setup: Optimised performance through lighting setup and lightmap baking.
Locomotion System: Integrated teleportation mechanics for user movement.
Visual Effects: Created visual effects using Unity's Shader Graph.
3D Modelling and Animation: Created the 3D models and animations of the machine and conveyor belts using
Autodesk Maya.
Optimisation: Addressed performance issues with Unity's profiling tools.
Challenges
Optimisation was one of the most difficult challenges during the application's development, mainly due to the
substantial impact of physics calculations on frame rates. Each row of sausages utilised joints to simulate physical
constraints, ensuring the rows remained connected but could realistically separate when rotating near the machine's
knives. Overcoming this problem required fine-tuning Unity's physics settings, simplifying colliders, reducing
geometry, and implementing time slicing, an effective technique for distributing heavy workloads across multiple
frames.
This project transitioned from a 2D e-learning module to an immersive VR training experience, significantly enhancing
learner engagement and retention. Utilizing the HTC VIVE Pro headset's advanced capabilities, the VR module provided
realistic, hands-on training, improving user understanding of PPE protocols, machine setup, and operational
procedures. Performance optimizations and accurate physics simulations ensured an effective experience. This concept
highlighted the potential of VR in professional training, setting a new standard for future e-learning initiatives.